Medan vi fortsätter att planera hur vi ska kolonisera månen, har Kina redan en murarrobot för att börja bygga en bas
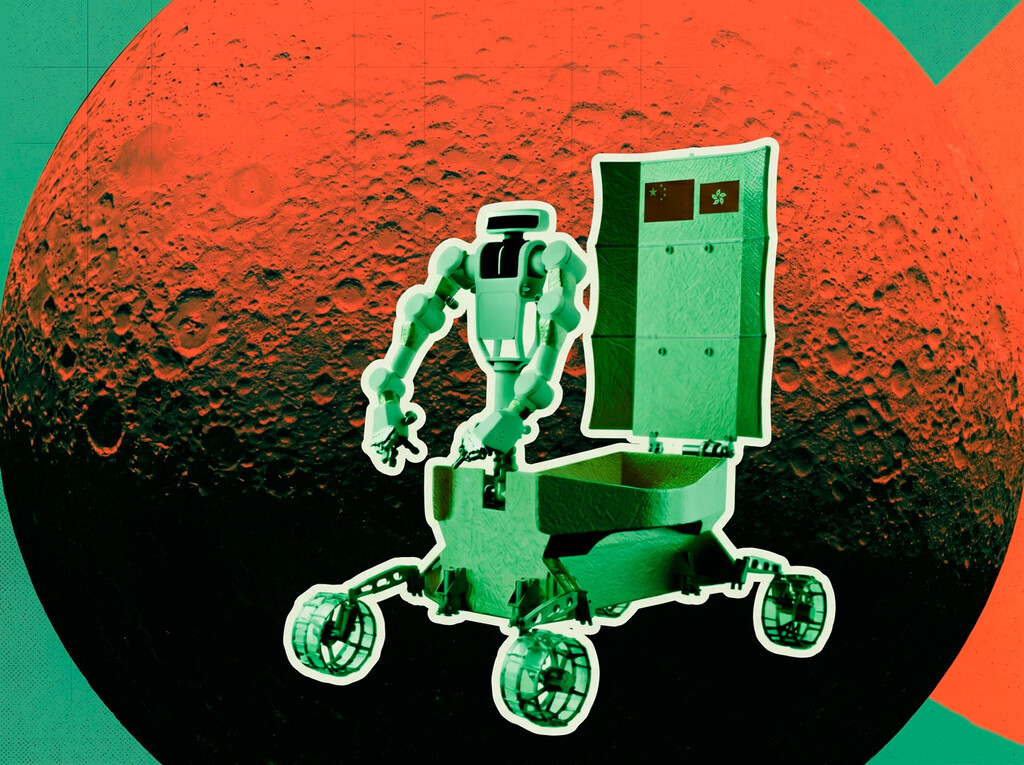
Om vi pratar om månutforskning tänker vi omedelbart på Artemis-programmet, men USA är inte det enda landet som driver mot koloniseringen av vår satellit. Kina har också ett program på gång och de visade precis upp en ny månrover med fyra hjul och en humanoid överkropp. Ditt jobb kommer att vara att hjälpa till med insamling av prover, transport och utplacering av instrument, ungefär som en portermurare.
Vad exakt är det. Det är en robot som väger cirka 100 kg med en nedre del med fyra hjul och en humanoid bål med två armar på överdelen. Det är ingen typisk vetenskaplig rover, men dess huvudsakliga funktion är att fungera som en bärare, plocka upp och placera olika föremål och instrument i deras positioner.
Hybriddesignen, med hjul att flytta och armar att manipulera, svarar mot ett specifikt behov: på månen finns det inga operatörer som kan flytta utrustning, ansluta sensorer eller installera instrument. Någon måste göra det, och att någon kommer att bli den här roboten. I Xataka fortsätter Kina att ta gigantiska steg i sitt rymdprogram: det har redan en superraketfabrik redo Tekniska utmaningar.
Roboten är utrustad med AI-system, fjärrseende och 3D-kartläggning för att kunna fungera i en totalt okänd miljö. Teamet som utvecklade den, ledd av Hong Kong University of Science and Technology, säger till South China Morning Post att huvudutmaningen är att se till att båda armarna rör sig på ett koordinerat och exakt sätt för att manipulera ömtåliga instrument. På jorden är det redan en komplex uppgift, men här kommer du att behöva göra det i en fientlig miljö med extrema temperaturer, ojämn terräng och ingen som kan reparera ett eventuellt haveri.
För att fungera drivs roboten av solenergi och är designad att fungera i två år på månens yta, vilket innebär att den kommer att tillbringa 24 månnätter, var och en på mer än 14 jorddagar. Under dessa perioder, eftersom den inte får solljus, måste roboten gå in i ett viloläge och vakna i början av en ny dag.
Uppdraget. Roboten är en del av Chang'e-8-uppdraget, planerat till 2028-2029. Det blir det åttonde uppdraget i Chang'e-serien, som Kina har använt sedan 2007 för att utforska månen progressivt: först orbiters, sedan landare, rovers och provinsamling.
Målet med Chang'e-8-uppdraget är att leverera material och börja förbereda marken för en permanent närvaro vid månens sydpol. Det är därför roboten inte bara är designad för att utforska, utan fungerar också. Chang'e-8 är en viktig del av International Lunar Research Station (ILRS), Kinas och Rysslands gemensamma projekt för att bygga en bas på månen med hjälp av 3D-utskriftstekniker.
Varför sydpolen. Valet av plats är inte av misstag. Månens sydpol har stor strategisk betydelse för rymdorganisationer eftersom det är där reserver av vattenis har upptäckts i dess kratrar.
Den isen har potential att bli bränsle, syre och vatten för vilken permanent bas som helst. Den som kommer först, lär sig navigera i terrängen och installerar fler instrument kommer att ha en enorm fördel. Det är därför både Chang'e-8 och Artemis III går till samma region.
Bild | Xataka med Tvillingarna i Xataka | Kinas mest ambitiösa rymdprojekt: en avancerad hyperspektral satellit för att "CT" jorden
Originalkälla
Publicerad av Xataka
15 maj 2026, 16:01
Denna artikel har översatts automatiskt från spanska. Klicka på länken ovan för att läsa originaltexten.
Visa originaltext (spanska)
Rubrik
Mientras seguimos planificando cómo colonizar la Luna, China ya tiene un robot albañil para empezar a construir una base
Beskrivning
Si hablamos de exploración lunar inmediatamente pensamos en el programa Artemis, pero Estados Unidos no es el único país empujando hacia la colonización de nuestro satélite. China también tiene un programa en marcha y acaban de mostrar un nuevo rover lunar con cuatro ruedas y un cuerpo superior humanoide. Su trabajo será asistir en la recogida de muestras, transporte y despliegue de instrumentos, algo así como un albañil porteador. Qué es exactamente. Se trata de un robot de unos 100kg con una parte inferior con cuatro ruedas y un torso humanoide con dos brazos en la parte superior. No es un rover científico al uso, sino que su función principal es actuar como porteador, recogiendo y colocando en sus posiciones distintos objetos e instrumentos. El diseño híbrido, con ruedas para desplazarse y brazos para manipular, responde a una necesidad concreta: en la Luna no hay operarios que puedan mover equipos, conectar sensores o instalar instrumentos. Alguien tiene que hacerlo, y ese alguien va a ser este robot. En Xataka China sigue dando pasos de gigante en su programa espacial: ya tiene lista una superfábrica de cohetes Retos técnicos. El robot está dotado con sistemas de IA, visión remota y mapeo 3D para poder desenvolverse en un entorno totalmente desconocido. El equipo que lo ha desarrollado, liderado por la Universidad de Ciencia y Tecnología de Hong Kong, cuenta a South China Morning Post que el principal reto es lograr que ambos brazos se muevan de forma coordinada y precisa para manipular instrumentos frágiles. En la Tierra ya es una tarea compleja, pero aquí va a tener que hacerlo en un entorno hostil con temperaturas extremas, terreno irregular y nadie que pueda reparar una posible avería. Para funcionar, el robot se alimenta mediante energía solar y está diseñado para operar durante dos años en la superficie lunar, lo que implica que pasarán 24 noches lunares, cada una de más de 14 días terrestres. Durante estos periodos, al no recibir luz solar, el robot tendrá que entrar en estado de hibernación y despertar al comenzar un nuevo día. La misión. El robot forma parte de la misión Chang'e-8, programada para 2028-2029. Será la octava misión de la serie Chang'e, la que China lleva usando desde 2007 para explorar la Luna de forma progresiva: primero orbitadores, luego módulos de aterrizaje, rovers y recogida de muestras. El objetivo de la misión Chang'e-8 es llevar materiales y empezar a preparar el terreno para una presencia permanente en el polo sur lunar. Por eso el robot no solo está diseñado para explorar, sino que también trabaja. Chang'e-8 es una pieza clave de la Estación Internacional de Investigación Lunar (ILRS), el proyecto conjunto de China y Rusia para construir una base en la Luna usando técnicas de impresión 3D. Por qué el polo sur. La elección de la ubicación no es casual. El polo sur lunar tiene gran importancia estratégica para las agencias espaciales porque es donde se han descubierto reservas de hielo de agua en sus cráteres. Ese hielo tiene potencial para convertirse en combustible, oxígeno y agua para cualquier base permanente. Quien llegue antes, aprenda a moverse en el terreno e instale más instrumentos tendrá una ventaja enorme. Por eso tanto Chang'e-8 como Artemis III van a la misma región. Imagen | Xataka con Gemini En Xataka | El proyecto espacial más ambicioso de China: un satélite hiperespectral avanzado para hacer un "TAC" a la Tierra (function() { window._JS_MODULES = window._JS_MODULES || {}; var headElement = document.getElementsByTagName('head')[0]; if (_JS_MODULES.instagram) { var instagramScript = document.createElement('script'); instagramScript.src = 'https://platform.instagram.com/en_US/embeds.js'; instagramScript.async = true; instagramScript.defer = true; headElement.appendChild(instagramScript); } })(); - La noticia Mientras seguimos planificando cómo colonizar la Luna, China ya tiene un robot albañil para empezar a construir una base fue publicada originalmente en Xataka por Amparo Babiloni .




